创新 • 创优 • 创见
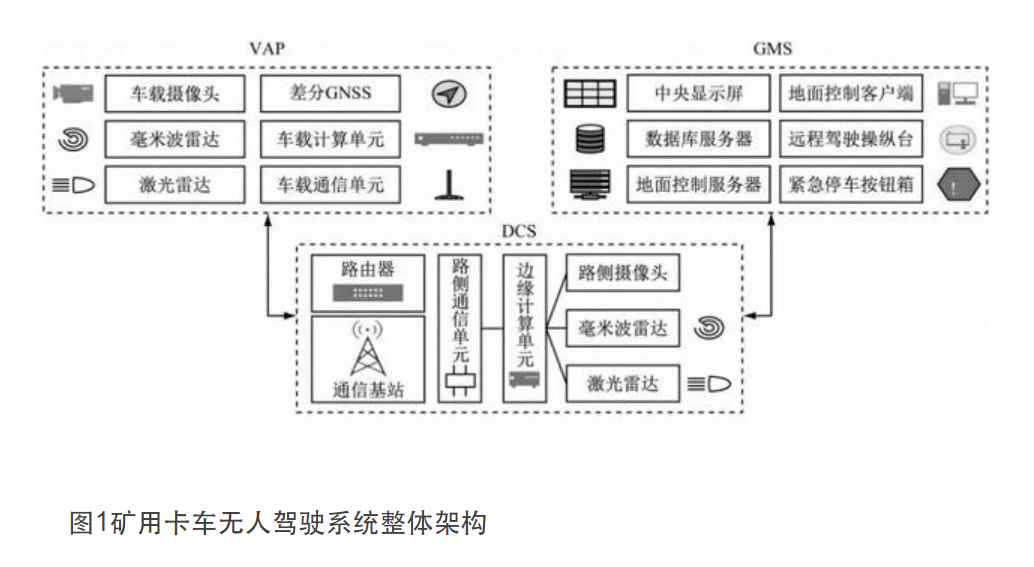
随着大型露天矿山开采深度加大,坡度大、弯道多的现象逐渐增多,生产难度不断增加。矿区无人化运营是实现安全生产、降低人工和整车使用成本、提升运行效率的有效途径。提出了一种露天煤矿卡车无人驾驶系统设计方案。无人驾驶系统整体架构如图2所示,包含车载自动驾驶子系统(VAP)、无线通信子系统(DCS)、地面管理子系统(GMS),可实现矿用卡车“装、运、卸”作业过程的完全无人自主运行。
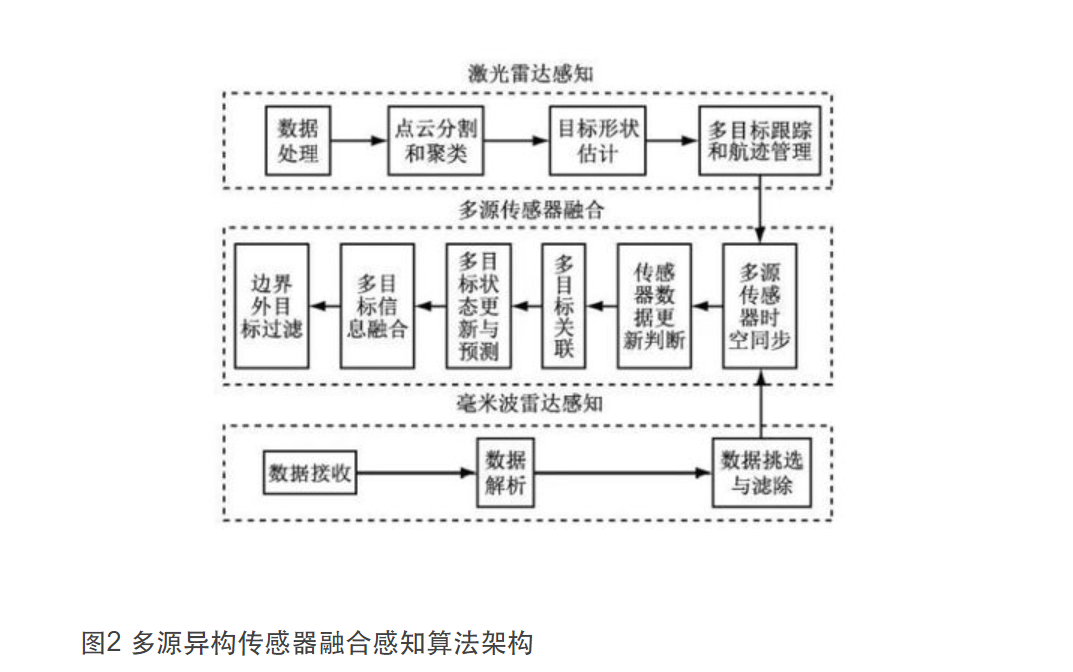
为满足矿山非结构化环境感知需求,充分利用多传感器特性,提出了面向矿山非结构化环境的多源异构传感器融合感知算法。根据传感器种类及组合方式不同,该算法分为激光雷达感知模块、毫米波雷达感知模块及多源传感器融合模块,如图2所示。
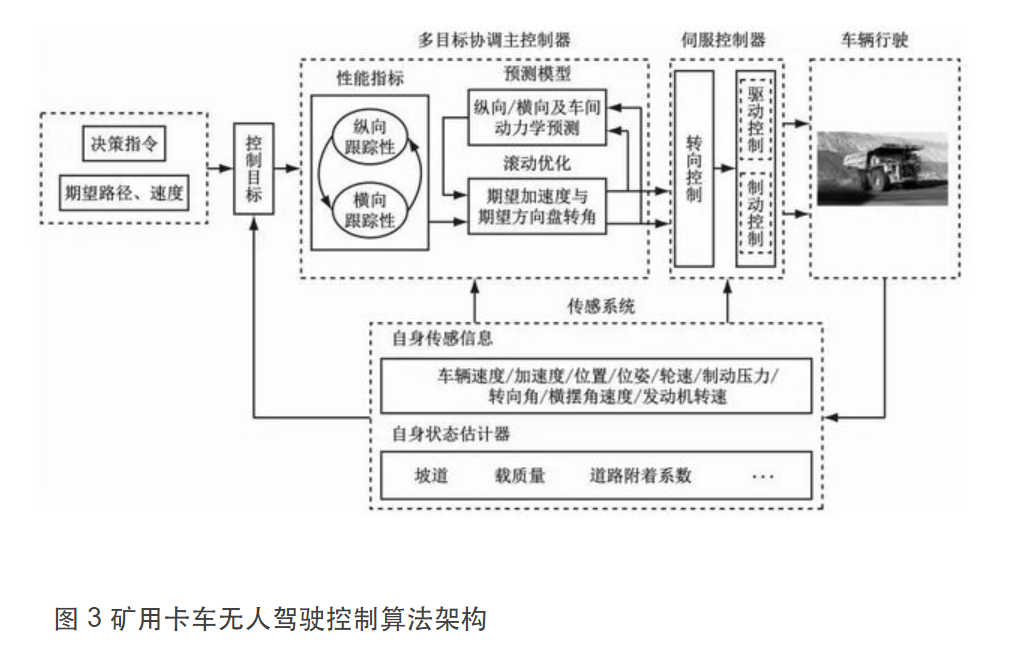
矿用卡车无人驾驶控制算法架构如图3所示。根据规划层下达的期望路径与速度信息,结合传感器采集的当前车辆速度、加速度、位置、位姿等信息,通过纵向控制器与横向控制器实时计算期望加速度与期望方向盘转角,并通过线控底盘接口控制转向轮角、电驱动/电制动与液压制动,实现车辆横纵向运动控制。